Word2Vec - Noise Constrastive Estimation
Noise Constrastive Estimation (NCE)
\(\mathbf{X} = (x_1, x_2, ..., x_{T_d}\) 는 random sample vector \(x \in \mathbb{R}^n\) 이며, 각각의 \(x_i\) 는 unknown probability density function \(P_d\) 을 갖고 있습니다. (예를 들어서 “사과” 라는 단어의 확률이 몇일까? 라는 관점에서 결코 알기 쉽지 않을 것입니다.)
\[\mathbf{X} \sim P_d\]Noise Constrastive Estimation의 기본적인 아이디어는 noise sample \(\mathbf{Y} = (y_1, y_2, ... y_{T_n})\) 을 알고있는 확률밀도함수 (known PDF) \(P_n\) 으로부터 가져온뒤 ratio \(\frac{P_d}{Pn}\) 를 추정(estimate)을 하고 궁극적으로 \(P_d\) 의 분포도를 알 수 있게 됩니다.
Definition
2개의 데이터셋 \(\mathbf{X}\) 와 \(\mathbf{Y}\) 를 연결시키기 위하여 합집합으로 연결을 시킵니다.
( \(\mathbf{u}\) 는 실제 샘플 데이터와 가짜 노이즈 데이터를 둘다 갖고 있는 형태라고 보면 됩니다.)
각각의 datapoint 는 \(\mathbf{u}_t \in \mathbf{X}\) 이라면 \(C_t = 1\) 그리고 \(\mathbf{u}_t \in \mathbf{Y}\) 이라면 \(C_t = 0\) 만약 입니다.
\[C_t = \left\{ \begin{array}{l} 1\ \ \text{if}\ \mathbf{u}_t \in \mathbf{X} \\ 0\ \ \text{if}\ \mathbf{u}_t \in \mathbf{Y} \\ \end{array} \right.\]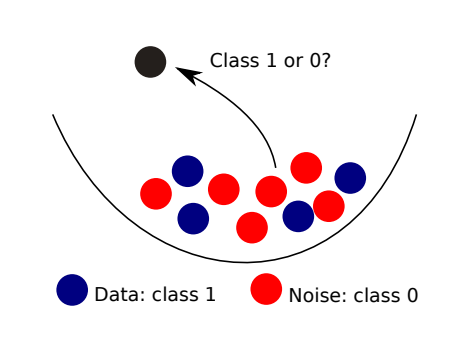
Random vector \(\mathbf{x} \in \mathbb{R}^n\) 의 샘플 데이터(진짜 데이터)는 위에서 언급했듯이 unknown probability density function (PDF) \(P_d\) 를 따릅니다.
PDF는 알수 없는 상황이기 때문에 \(P_d(.) = P_m(.;\theta^*)\) 를 가정하는 모델을 만듭니다.
여기서 \(\theta^*\) 는 true model vector parameters 이며 \(\theta^*\) 를 학습시켜서 objective function을 maximize 하도록 만들어야 합니다.
위와같은 정의에서 Likelihoods는 다음과 같습니다.
\[\begin{align} P\big(\mathbf{u}\ \big|\ C = 1 \big) &= P_m \bigl( \mathbf{u} ; \theta \bigr) & data \\ P\big(\mathbf{u}\ \big|\ C = 0 \big) &= P_n \big( \mathbf{u} \big) & noise \end{align}\]Priors는 다음과 같습니다.
\[P(C = 1) = \frac{T_d}{T_d + T_n}\] \[P(C = 0) = \frac{T_n}{T_d + T_n}\]따라서 \(\mathbf{u}\) 에대한 확률 \(P( \mathbf{u} )\) 은 다음과 같습니다.
공식에 대한 이해가 필요하면 Bayes Rules을 참고 합니다.
\(\text{posterior} = \frac{\text{likelihood} \cdot \text{prior}}{\text{evidence}}\)
Posterior Probabilities 는 다음과 같습니다.
\[\begin{align} P\big(C=1\ \big|\ \mathbf{u};\theta\big) &= \frac{P\big(\mathbf{u}\ \big|\ C = 1; \theta\big) * P\big(C = 1\big)}{P\big(\mathbf{u}\big)} \\ &= \frac{ P_m \big(\mathbf{u} ; \theta \big) * \frac{T_d}{T_d + T_n} }{ \bigg( \frac{T_d}{T_d + T_n} * P_m \big(\mathbf{u} ; \theta \big) \bigg) + \bigg( \frac{T_n}{T_d + T_n} * P_n \big(\mathbf{u} \big) \bigg) } \\ &= \frac{ P_m \big(\mathbf{u} ; \theta \big)}{ \bigg[ \bigg( \frac{T_d}{T_d + T_n} * P_m \big(\mathbf{u} ; \theta \big) \bigg) + \bigg( \frac{T_n}{T_d + T_n} * P_n \big(\mathbf{u} \big) \bigg) \bigg] * \frac{T_d + T_n}{T_d}} \\ &= \frac{ P_m \big(\mathbf{u} ; \theta \big)}{ P_m \big( \mathbf{u}; \theta \big) + \left( \frac{T_n}{T_d} \right) P_n \big( \mathbf{u} \big)} \end{align}\]이때 \(v\) 는 다음과 같이 정의합니다.
\[v = \frac{T_n}{T_d} = \frac{P(C=0)}{P(C=1)}\]\(v\) 를 대입하면 최종적으로 posterior probabilities 는 다음과 같습니다.
\[\begin{align} P\big(C=1\ \big|\ \mathbf{u}; \theta \big) &= \frac{P_m \big( \mathbf{u}; \theta \big) }{ P_m \big(\mathbf{u} ; \theta \big) + vP_n \big( \mathbf{u} \big)} &[1] \\ P\big(C=0\ \big|\ \mathbf{u}; \theta \big) &= \frac{ vP_n \big( \mathbf{u} \big) }{ P_m \big(\mathbf{u} ; \theta \big) + vP_n \big( \mathbf{u} \big)} &[2] \end{align}\]이때 [2]은 [1]과 동일한 방법으로 계산한 결과 값 입니다.
\(P(C=1 | \mathbf{u}; \theta)\) 는 다음과 같이 rewritten될 수 있습니다.
[4] 그리고 [5]은 모두 [3]에서 도출되었습니다.
[4]에서는 앞전에서 찾으려고 했던 estimate ratio \(\frac{P_n ( \mathbf{u} )}{ p_m (\mathbf{u}; \theta)}\) 를 볼수 있습니다.
[5]에서는 log ratio로 변환했습니다.
\(\log_d(a/b) = \log_d a - \log_d b\)
[6] 에서는 \(P(C=1 | \mathbf{u}; \theta)\) 를 \(h(\mathbf{u};\theta)\) 로 표기합니다.
\(G \big(.;\theta \big)\) 는 두 분포 \(P_m(\mathbf{u};\theta)\) 그리고 \(P_n(\mathbf{u})\) 사이의 log ratio를 정의합니다.
\[\begin{align} G \big(\mathbf{u}; \theta \big) &= \ln \frac{P_m \big( \mathbf{u}; \theta \big)}{P_n \big( \mathbf{u} \big)} \\ &= \ln P_m \big( \mathbf{u} ; \theta \big) - \ln P_n \big( \mathbf{u} \big) \end{align}\]따라서 [5]의 공식은 다음과 같이 써질수 있습니다.
\[h \big( \mathbf{u} ; \theta \big) = r_v ( G ( \mathbf{u} ; \theta ) )\]여기서 \(r_v\) 는 다음과 같습니다.
\[r_v(\mathbf{u}) = \frac{1}{1 + v \exp(-\mathbf{u})}\]즉 \(v\) 를 parameter로 갖는 Sigmoid/Logistic function이 되게 됩니다.
Logistic function의 정의는 다음과 같습니다.
\(\phi(z) = \frac{1}{1+e^{-z}} = \frac{ e^{z} }{ 1 + e^{z} }\)
Objective Function
Class labels \(C_t\) 는 Bernoulli and iid 로 가정을 합니다. Conditional log-likelihood는 다음과 같이 정의 됩니다.
\[\begin{align} L(\mathbf{\theta}) &= \sum^{T_d + T_n}_{t=1} C_t \ln P\big(C_t = 1\ \big|\ \mathbf{u}_t ; \mathbf{\theta}\big) + \big(1-C_t\big) \ln P\big(C_t = 0\ \big|\ \mathbf{u}_t ; \mathbf{\theta}\big) \\ &= \sum^{T_d}_{t=1} \ln \big[ h \big(\mathbf{x}_t; \mathbf{\theta} \big) \big] + \sum^{T_n}_{t=1} \ln \big[1 - h \big(\mathbf{y}_t; \theta \big) \big] \end{align}\]저 위에서부터 써놓은 가장 흥미로운 사실들이 여기에 모두 집결이 됩니다.
\(\theta\) 에 관하여 \(L(\mathbf{\theta})\) 를 optimizing하는 것은 결론적으로 log-ratio \(\ln(P_d/P_n)\) 인 \(G(.; \hat{\mathbf{\theta}})\) 을 추정(estimate)하는 것과 동일합니다.
Normalization
\(- L(\theta)\) 는 cross-entropy function과 동일 합니다.
결과값은 Logistic Regression (supervised learning)를 연산하여 나온 density estimation (unsupervised learning task)을 보여줍니다.
NCE Estimator
처음 언급을 했었듯이 \(P_d\) 는 parameterized model \(p_m(.; \theta^*)\) 와 동일합니다. 즉.. \(P_d(.) = P_m(.;\theta^*)\) 이며 normalized pdf \(P_m (. ; \theta)\) 는 다음의 제약조건을 받으시 따라야 합니다.
\[\begin{align} \int P_m\big( \mathbf{u} ; \theta \big) \ d\mathbf{u} = 1 && \text{# normalization constraint} \\ P_m\big( \mathbf{u} ; \theta \big) \le 0 && \text{# positivity constraint} \end{align}\]\(\theta\) 는 Model parameters 를 가르키고, \(\hat{\theta}\) 는 estimate of the model parameters를 가르킵니다.
첫번째 조건인 normalization constraint를 만족시키지 못하는 경우, 해당 모델을 unnormalized model이라고 합니다.
대표적인 unnormalized models은 다음과 같습니다.
- Image : Markov Random Field
- Text : Neural probablistic language models
- Physics : Ising model
Unnormalized model인 경우 partition function을 사용해서 unnormalized model을 normalized model로 변경시켜줄수 있습니다.
Partition function \(Z(\alpha)\) 를 사용하여 unnormalized model을 normalized model로 변경시켜주며,
probability density function \(P_m \big(.; \alpha \big)\) 또한 다음과 같이 변하게 됩니다.
\(P^0_m (.; \alpha )\) 은 probability density function이지만 1로 integrate될 필요는 없습니다.
\(Z(\alpha)\) 의 경우는 좀 문제가 있습니다. integral자체가 쉽지가 않습니다. (특히 dimension 자체가 커지면 커질수록 numerical integration이 매우 어려워집니다.
이래서.. unnormalized model을 위한 estimation으로 나온것이 Noise Constrastive Estimation (NCE) 입니다.
기본적으로 normalizing constant \(Z(\alpha)\) 를 하나의 parameter \(c\) 로 사용하며 정의는 다음과 같습니다.
따라서 normalized model \(P_m (; \theta)\) 는 다음과 같이 재정의 될 수 있습니다.
\[P_m = P^0_m(;\alpha) + c\]여기서 \(\theta = (\alpha, c)\) 입니다. \(\hat{\theta} = (\hat{\alpha}, \hat{c})\) 를 학습한 이후부터, \(\hat{c}\) 는 \(\ln \frac{1}{Z(\hat{\alpha})}\) 에 대한 추정치(estimate)을 갖게 됩니다.
Unnormalized model \(P^0_m (; \theta)\) 대한 estimator는 \(\theta\) 를 maximize함으로 정의될 수 있습니다.
이때 \(h(.; \theta) \in (0, 1)\) 입니다.
결과적으로 optimal parameter \(\hat{\mathbf{\theta}}_T\) 는 \(G(\mathbf{u}_T ; \mathbf{\hat{\theta}}_T)\) 를 \(\mathbf{u}_T \in X\) 에 관하여 가능하면 크게만들고, \(\mathbf{u}_T \in Y\) 에 대해서는 가능하면 최대한 작게 만듭니다.
쉽게 이야기하면 \(\theta\) 를 학습하는데 기준은 \(P(C=1; \mathbf{u};\mathbf{\theta})\) 결과값이 \(x_i\) 에 대해서는 크게, \(y_i\) 에 관해서는 작게 만드는게 목표입니다.
즉 logistic regression이며, 원래는 unsupervised 문제인데 supervised문제로 만들어서 문제를 해결합니다.